GitBucket
GitBucket
Newer
#Occupancy Grid Mapping(占用栅格地图构建)
一、栅格的定义
将连续空间离散化成一个个栅格。然后每个栅格用一个布尔随机变量来描述:
二、传感器测量模型
激光传感器的一次测量可以确定一条线段上所有栅格是否被占用(不是一般性,假设是单线激光雷达),相应的附一个概率值,总共有如下四中情况
三、带入贝叶斯公式
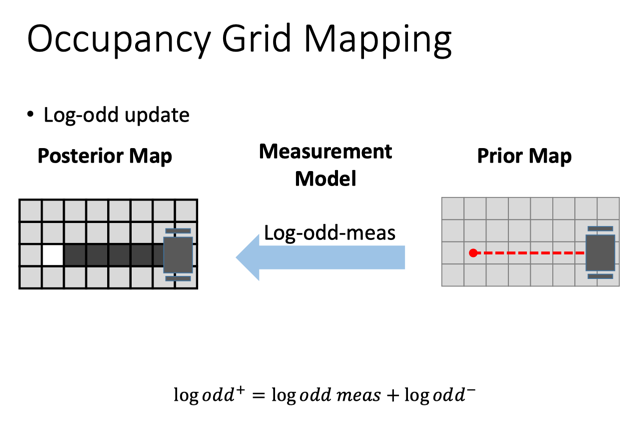
在(随机)先验的地图下,通过读取激光雷达传感器的测量数据,对地图用贝叶斯公式进行实时更新:
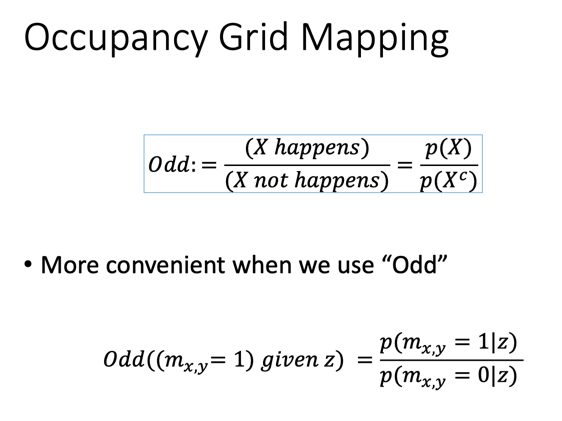
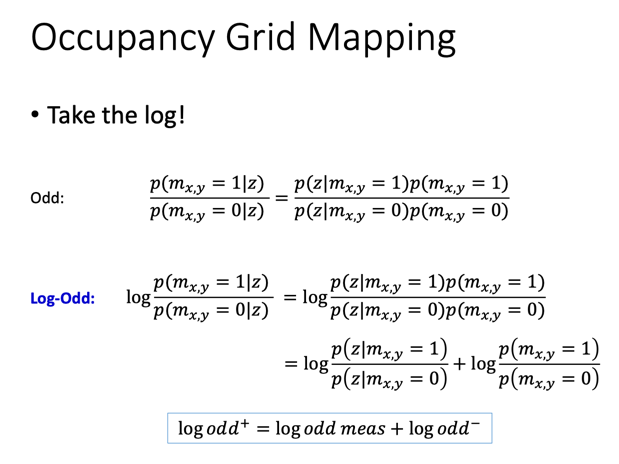
四、Log-odd
定义odd运算,然后再取log,可以将贝叶斯公式中的相乘各项化为相加,达到变量分离方便迭代更新的目的: